
L’ecografia è un esame utilizzato in quasi tutti i distretti corporei che si basa sulla capacità degli ultrasuoni di entrare nel corpo e rimbalzare in modo differente sui diversi tessuti. Considerata spesso un esame filtro prima di effettuare indagini di imaging più complesse, anche perché non sono stati riscontrati effetti biologici dannosi legati alla metodica, utilizza sonde che vengono messe a contatto con il corpo.
Il medico che utilizza un ecografo difficilmente pensa al processo di produzione delle sonde stesse. Proprio il desiderio di ottimizzare questo processo ha portato l’italiana Esaote a contattare l’Istituto di Biorobotica della Scuola Superiore Sant’Anna di Pisa con l’obiettivo di rendere automatico il processo di verifica finale della qualità delle sonde ecografiche, in linea con i principi dell’industria 4.0.
Attualmente la verifica strumentale finale della qualità di una sonda ecografica viene effettuata in tutto il mondo con il Pulse-Eco test. Ora, tutti i dispositivi per effettuare il Pulse-Echo test sono poveri di robotizzazione e, tipicamente, è un operatore a posizionare la sonda manualmente nel dispositivo e a misurarne il segnale di ritorno indicato dall’oscilloscopio. Inoltre, è sempre l’operatore a posizionare e orientare la sonda attraverso delle guide lineari.
Quindi le performance del test sono scarse in termini sia di riproducibilità sia di ripetibilità: bastano piccole differenze nel posizionamento della sonda per inficiare i risultati del test.
«Esaote - interviene l’ingegner Michele Bacchereti dell’Istituto di Biorobotica - ci ha interpellati per bypassare questo problema. Il fatto che i risultati dei test non siano sempre ripetibili crea a sua volta un disagio all’azienda, che non ha dati certi sui quali basare eventuali migliorie sul processo produttivo nel suo insieme. Migliorie che porterebbero alla produzione di sonde più efficienti».
In effetti, se ci si pensa bene, quando si ha a che fare con un processo di produzione, poter misurare con certezza le caratteristiche del prodotto finito consente di confrontare tra loro le qualità del prodotto nel tempo e verificare se cambi nella produzione si traducono in migliori performance.
Come racconta l’ingegner Bacchereti: «il primo passo è stato ragionare sul livello di robotizzazione da utilizzare». L’azienda in questione ha infatti una linea produttiva organizzata in modo da rendere difficile un’automazione. «Non era possibile prendere in considerazione una cella robotica standard. Il lavoro degli operatori si svolge su postazioni attrezzate in un reparto produttivo e una cella standard avrebbe richiesto una completa riorganizzazione dello spazio produttivo, con costi decisamente non sostenibili. Abbiamo quindi dovuto scegliere una cella robotica cooperativa, che coinvolga anche l’uomo. In questo modo il braccio robotico potrebbe essere posizionato facilmente sulla postazione».
Andrea Grandoni di Esaote conferma: «l’automazione completa non si sposa con il processo di manifattura delle sonde a ultrasuoni, in quanto caratterizzata da bassi volumi ed elevato mix di prodotti. Inoltre, la robotica collaborativa migliora il rapporto costo/beneficio e il processo di qualità, il che ci ha spinto a chiedere l’ideazione della cella stessa e lo studio di fattibilità».

Aggiunge Bacchereti: «nel caso di Esaote la robotica collaborativa ha anche altri vantaggi: automatizzare del tutto il Pulse-Eco test avrebbe richiesto un forte impegno dal punto di vista non solo economico ma anche tecnico e progettuale. Infatti, una cella tradizionale è chiusa e svolge tutte le funzioni in autonomia, mentre nella robotica collaborativa le azioni più complesse da automatizzare restano nelle mani dell’uomo. Tutto ciò semplifica il lavoro di ideazione e consente di avere un migliore processo senza investire troppo. Inoltre, una robotica collaborativa consente all’operatore di lavorare in sicurezza senza introdurre troppi cambiamenti».
La soluzione proposta dall’Istituto di Biorobotica è piaciuta all’azienda, che ha commissionato anche lo studio di fattibilità. Studio che ha dato i risultati sperati.
Il Pulse-Echo Test viene effettuato alla fine della catena di produzione. Dopo questa fase mancano solo i controlli immagine, di sicurezza ed estetico. Prima di farlo, occorre verificare se questa lavora correttamente. Come abbiamo detto, il test si svolge all’interno di una vasca piena d’acqua, dal momento che questo mezzo ha proprietà acustiche simili a quelle del corpo. La sonda deve quindi essere posizionata in vasca. Il posizionamento della sonda nella vasca è proprio la fase del test più soggetta a imprecisione e a “errori” dovuti all’uomo.
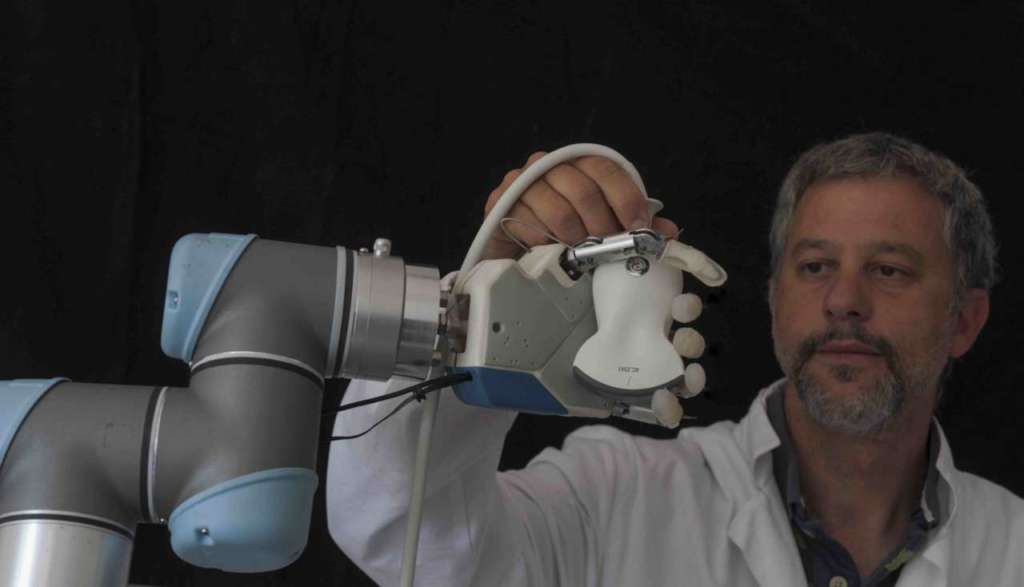
«Per la costruzione della cella robotica ci siamo quindi concentrati su questo punto», puntualizza l’ingegner Bacchereti, che prosegue. «Il robot che abbiamo costruito ha un gripper in grado di “afferrare” la sonda. Quindi, l’operatore passa la sonda al braccio robotico e, tramite un software specifico, può interagire con il robot stesso, dicendogli di chiudere il grip. A questo punto può dargli il comando di mettere la sonda in acqua per il test. Per rendere questo passaggio preciso e ripetibile, abbiamo messo una catena di acquisizione esternamente alla cella, in grado di indicare quando la sonda è posizionata bene rispetto al target: è la catena, quindi, che dice all’operatore che la sonda è al posto giusto».
A questo punto l’operatore procede con il Pulse-Echo test, finito il quale l’operatore dice al robot di togliere la sonda dall’acqua e di liberarla. Infine, l’operatore la riposiziona.
Lo studio di fattibilità
La verifica dell’efficacia della cella collaborativa nel valutare la qualità delle sonde ecografiche è stata condotta su una sonda addominale, chiamata AC2541. La sonda, una convex array R50, è costituita da 192 elementi e ha una frequenza nominale di 3.5 MHz. Le misure, si legge nel report dello studio, sono state condotte facendo emettere a ogni sonda un singolo ciclo da 3,5 MHz mediante un Ohm Function Generator. Per ogni sonda si è proceduto a registrare sia l’impulso di eccitazione sia il segnale di ritorno generato da un riflettore R80 posizionato a 3 cm di distanza dalla superficie del dispositivo. I test sono stati condotti, per ogni sonda, sia con gestione manuale da parte dell’operatore sia utilizzando la cella collaborativa. Inoltre, per ogni configurazione si sono ripetuti 5 test usando lo stesso trasduttore.
«Ciò che si è osservato - spiega l’ingegner Bacchereti - è che l’allineamento automatico permette di ridurre la variabilità del sistema di misura. Ovviamente ciò avviene se l’operatore è stato istruito su come “parlare” con il braccio robotico. Inoltre, abbiamo dimostrato che se si salva la posizione del gripper una volta ottenuto un buon allineamento, il robot è in grado di riprodurre la posizione da solo, richiedendo solo piccoli aggiustamenti da parte dell’operatore. Un fatto che riduce i tempi richiesti per effettuare un buon test».
Lo studio ha dimostrato che l’uso di questa cella robotica collaborativa può non solo migliorare la qualità del Pulse-Echo test ma anche ridurne il tempo di svolgimento. Al momento i risultati dello studio sono in fase di analisi da parte di Esaote, che deve decidere se introdurre o meno la cella robotica al suo interno. Da sottolineare, però, che la cella robotica potrebbe essere usata in tutte le situazioni nelle quali è richiesto di posizionare un oggetto in modo preciso rispetto a un altro. La sua applicazione potrebbe quindi andare oltre.










{kind=link}